In Jahrmillionen der Evolution hat die Natur für viele Probleme Lösungen ersonnen, die Wissenschaftler gern abkupfern. Ein Team aus Würzburg und Bremen hat sich von einer Eidechse zu den Rädern eines Marsrovers inspirieren lassen.
13:09 Uhr
|
|
21.05.2026 13:09 Uhr |
In Jahrmillionen der Evolution hat die Natur für viele Probleme Lösungen ersonnen, die Wissenschaftler gern abkupfern. Ein Team aus Würzburg und Bremen hat sich von einer Eidechse zu den Rädern eines Marsrovers inspirieren lassen.
Der Sandfisch ist eine Eidechse, die in der Sahara vorkommt. Für die Fortbewegung im Sand hat er eine besondere Fortbewegungstechnik entwickelt: Er schwimmt durch den Sand, wenn er Jägern entkommen will oder selbst auf der Jagd ist.
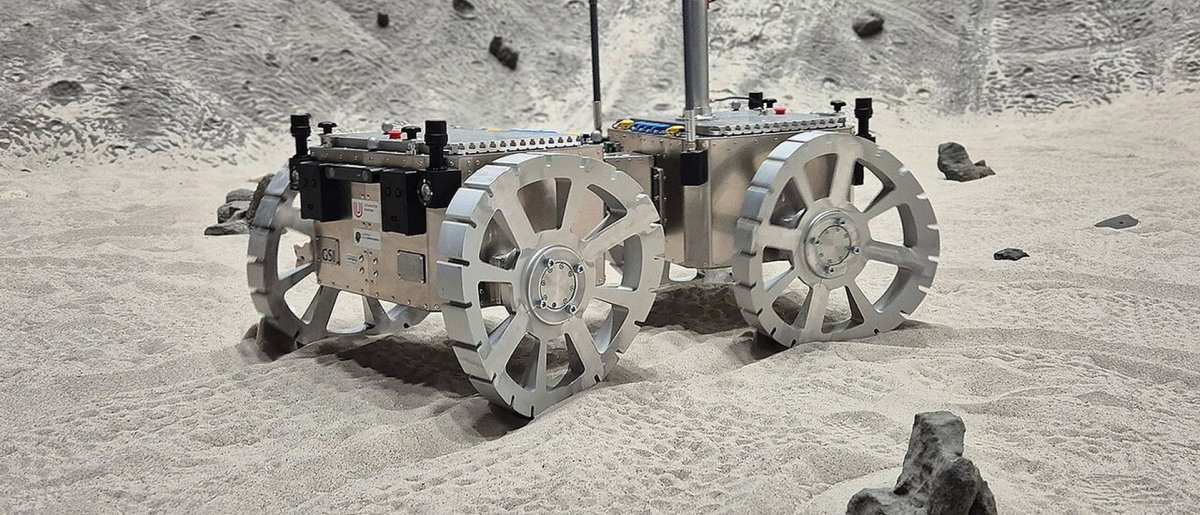
Dieses Bewegungsprinzip, das erst vor wenigen Jahren entschlüsselt wurde, hat das Team um Marco Schmidt, Leiter der Professur für eingebettete Systeme und Sensoren für die Erdbeobachtung (ESSEO) an der Universität Würzburg, nachgebildet. Es hat daraus Räder für einen Marsrover entwickelt. Darauf soll der Rover nicht durch losen Sand, durch den er weite Strecken zurücklegen muss, fahren. Stattdesse schwimmt er hindurch, ähnlich dem Sandfisch.
Das sieht merkwürdig aus: Die Räder eiern, vergleichbar einer Fahrradfelge mit einer Acht. Sie ermöglichen aber eine stabile Fortbewegung auf dem losen Untergrund. „Die Räder imitieren die charakteristische Wechselwirkung des Tiers mit dem Boden, wobei sowohl Längs- als auch Querkräfte erzeugt werden“, sagte Projektleiter Schmidt. „Der Rover hinterlässt im Sand sinusförmige Spuren – das bestätigt, dass der beabsichtigte Schwimmmechanismus erreicht ist.“
Ein Rover auf dem Nachbarplaneten muss mit uneinheitlichem Gelände klarkommen. Konventionelle Räder haben damit Schwierigkeiten und werden stark beansprucht. „Herkömmliche Radkonstruktionen sind oft für das Fahren bei niedrigen Geschwindigkeiten optimiert und neigen dazu, auf weichem Boden zu rutschen, einzusinken oder stecken zu bleiben“, sagt Amenosis Lopez aus dem ESSEO-Team.
Getestet hat das Team um Schmidt den Rover zusammen mit den Robotikern des Deutschen Forschungszentrums für Künstliche Intelligenz (DFKI) in Bremen und der Universität Bremen. Er wurde auf Sand und im Freiland getestet. Dabei zeigten sich noch Verbesserungsmöglichkeiten, sagte Schmidt: Die ersten Sandfisch-Räder seien schwerer und schmaler als pneumatische Vergleichsräder gewesen. Das habe den Druck auf den Untergrund erhöht. Die Räder sanken ein, es kam zu Schlupf, was dazu führte, dass der Rover schlechter zu steuern war.
Das ließ sich beheben, indem die Räder breiter und leichter gestaltet wurden. „Weitere Verfeinerungen der Radoberfläche dürften die Leistung auf gemischtem Gelände weiter verbessern“, sagen die Forscher. Neben der Hardware entwickeln sie auch eine Software, die Rutschen, Einsinken und die Wechselwirkung zwischen Gelände und Rad explizit berücksichtigt und so ein stabileres und anpassungsfähigeres Verhalten des Rovers ermöglicht.
Das Projekt ist Teil der Initiative Valles Marineris Explorer (Vamex) des Deutschen Zentrums für Luft- und Raumfahrt (DLR). Dessen Ziel ist es, einen Schwarm von Rovern, Crawlern und Drohnen zu entwickeln, die das Valles Marineris auf dem Mars erforschen sollen.
(wpl)